
Por suerte esta controladora lo tiene todo listo para usar solo hay que saber como 🙂
Si no has tenido una Omnubus F4 Nunca Instalada en tu ordenador mira en este Link como se Hace.
ANTES DE COMENZAR TENER EL DRONE SIN HÉLICES COLOCADAS

Lo Primero conectamos la controladora
![]()
Abrimos Betafligth

le damos a Conectar(asegurarse que el puerto es el correcto)

Nos aparecerá en la pestaña Setup el estado de la controladora
![]()
si ya tenemos el drone montado y recto y el abatar del drone en betafligth no esta recto presionamos Calibrate Accelerometer

con este paso el drone si esta recto y la controladora esta atornillada recta tendría que quedarnos plano
![]()
pasamos a la pestaña Ports

de momemto comprobamos el estado de los puertos de la controladora
![]()
Comprobamos que UART1 esta activado para Serial RX
![]()
Pasamos a la pestaña de Configuration
Ahora Veremos los distintos Sectores de Configuración y las opciones
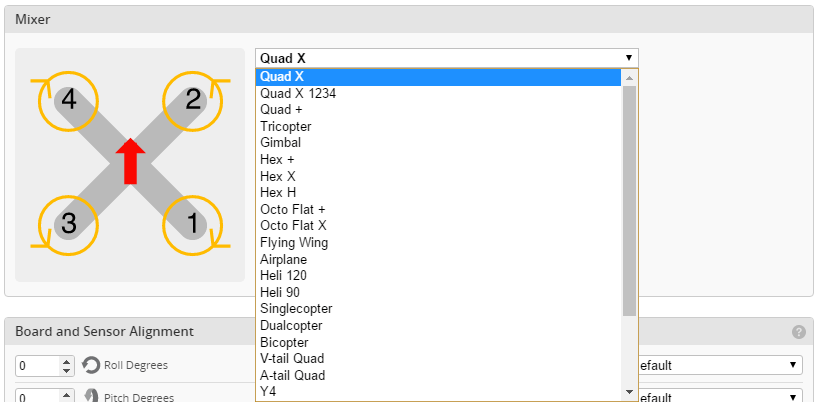
Comenzamos por Mixer
Seleccionamos el Tipo de quad que tenemos en mi caso y el de la mayoria en QUAD X

Vamos a ESC/Motoro Feature
Esta controladora ya viene actualizada para poder utilizar DSHOT

La configuración para DSHOT 150, 300 y 600 es la misma ( por mi parte no aconsejo poner la opción de Motor Stop en ninguna configuracion)

Para las Señales analógicas ( PWM, OneSHOT42, OneSHOT125, Multishot) es la misma configuración
Minimun throttle 1070, Maximun Throttle 2000, Minimun Command 1000
NO ES UNA CONTROLADORA PARA MOTORES BRUSHED POR LO TANDO NO ACTIAR
 Alinear la placa si esta girada. Por las dimensiones de la controladora y la posicion de los cables normalemte va recta, pero aqui podemos indicar si esta girada de Pitch, Roll o Yau
Alinear la placa si esta girada. Por las dimensiones de la controladora y la posicion de los cables normalemte va recta, pero aqui podemos indicar si esta girada de Pitch, Roll o Yau

Accelerometer Trim: Si utilizas el acelerometro y no queda recto a la hora de calibrar lo puedes trimar desde aqui

Esta controladora Solo tiene Entrada de receptor por Sbus por lo que la configuración debería quedar tal cual viene
![]()
RSSI: Esta controladora no tiene entrada analógica Física para colocar esta opción por lo que tiene que estar apagada

Vbat: ya por defecto vienen bien los valores de celdas y batería pero si vemos que no marca el voltaje de forma correcta aumentamos o reducimos poco a poco el valor de Voltage Scale

System Configuration: por defecto la controladora viene con un valor de giroscopo 8khz y 2khz de loop, pero el maximo de la controladora es 8khz en giroscopo y 8 de loop.
si quieres dejar activado el Accelerometer solo influye en casi el 1% del Uso del CPU depues de unos 10 minutos activa la controladora por lo que no te preocumes no sube de ese valor

Current Sensor: esta controladora tiene sensor amperometrico por lo que mediante el osd se puede ver el amperage consumido en tiempo real y la cantidad de miliamperios gastados en la batería. de fabrica ya viene activado.
![]()
GPS: para un drone de carreras No es Nada recomendable usar GPS pero previa configuracion del Puerto al Cual Lo quieres Conectar lo puedes Activar desde Aqui

Other Feature: desde aquí podemos activar o desactivar:
OSD, Air Mode Permanete, LED_Strip( configuracion y uso de los led programables), Blackbox(para grabar lo que hace la controladora y que captan los sensores), telemetria.
Las demas opciones no Son configurables( No se pueden Activar en esta controladora)
![]()
Presionamos Save and Reboot para Guarda
![]()
Vamos a la Pestaña Failsafe
Por defecto viene bien configurado pero No esta Mal revisarlo

Pulso maximo y minimo para detectar la perdida de la emisora

Procedimiento de Stage 2 Activado

Modo de actuar del Failsafe= Drop
![]()
PID Tuning Nos lo saltaremos ya que depende de cada Drone
![]()
Receiver: aqui comprobamos si tenemos el receptor conectado que funcione adecuadamente.
Con el Drone sin Hélices conectamos la batería

también debemos comprobar que con los stick al medio el valor que nos de sea de 1500
![]()
mientras que el maximo del recorrido sea 2000
{kind=link}
![]()
y el minimo 1000
Tenemos que ver el mapa de canales que tenemos que corresponda
hay 2 tipos de configuracions

TAER : JR, Spektrum, Graupner (Canal 1=gas, canal 2=Roll, canal 3=pitch, canal 4=yau)

AETR: default, Furtaba, Hitec (Canal 1=Roll, canal 2=pitch, canal 3=gas, canal 4=yau)

RSSI Channel: podemos configurar la Emisora para que en un canal de el valor de lo que recibe( en mi caso el 12)

valor del centro del stick

Ajustar la cantidad de punto muerto del Stick( muy util si la emisroa es imprecisa)

Ajustar el punto Muerto del Yau ( si al dar gas mueves un poco el stick hacia los lados puedes ajustar para que no lo detecte
![]()
con todo ajustado para guardar los cambios vamos a presionar el botón Save
![]()
Vamos a la Pestaña Modes
Por defecto vienen todos desactivados
![]()
para activar un modo debajo del nombre del modo hay un botón que dice Add Range precionamos el boton y de activara la barra
![]()
la podemos deslizar, estirar o contraer a la posición que queramos. o mesclar según la posición de distintos AUX para que se active

a la izquierda de la barra podemos seleccionar el AUX que queramos para activar. y debajo de este nos dice desde que valor a que valor se activara el modo.
Desde Aqui podemos activar: Armado, Modos de vuelo como Angle, Horizon, Air Mode, Buzzer(beeper), Apagar los Leds(LEDLOW), que no se vea el OSD en Pantalla(OSD SW), Grabar con Blackbox, etc.
![]()
una ves tenemos todo seleccionado damos al botón de save

De momento nos saltaremos 2 pestañas
![]()
vamos a MOTORS
Con el Drone sin Hélices conectamos la batería

Los motores miran el drone desde atrás los motores van en este orden

Para comprobar que giren en el sentido correcto tenemos que activarlos. Recordar que no tiene que tener hélices colocadas

los activamos desde este deslizante

con los deslizables subimos un poco hasta que comienzan a girar(Es solo para Comprobar No hace falta subir mucho)
Comprobamos que el sentido de los motores sea el correcto.
Si todos giran en el sentido correcto simplemente desactivamos motores. en caso contrario tendremos que utilizar BLHeli configurator o Suite y cambiar el giro de los Morores.
Si utilizamos Protocolo de Pulso como PWM, OneSHOT 42, OneSHOT125 o MultiShot Desconectamos la Bateria y Hacemos el Procedimiento de calibrado de variadores.
![]()
Pasamos al OSD
Tenemos 3 Columnas de izquierda a derecha

Elements: son deslizables que activando se mostrara en pantalla ( en caso de opciones de VTX nos habilitara el menú).

Preview: Nos Mostrara las opciones que activamos anteriormente mostrandonos como quedara

Video Format : Podemos Seleccionar si la cámara es NTSC o PAL o que detecte automáticamente

Units: Unidad de medida formato Imperial y metrico

Alarmas: Aquí nos deja colocar los valores con los que empezara a parpadear cuando llegue este valor para avisarnos.
por ejemplo si llegamos al 20% de la señal de la emisora, o si consumimos 1200mAh, o llevamos mas de 3 minutos de vuelo comienza a parpadear el valor
![]()
una vez configurado le damos al botón de save
NOTA: DEBO ACLARAR QUE PARA EL USO DEL OSD NO HAY QUE PONER NINGÚN COMANDO EN CLI SOLO ACTIVARLO DESDE CONFIGURATION
No es necesaria ninguna otra configuración para que se pueda volar
{kind=link}
Gracias!!!!
gracias por el trabajo!!! tengo una consulta, en esta emisora como se conecta i-bus? gracias por la info.
tienes que conectar en el Puerto SBUS como si fuese SBUS y desde la configuración del tipo de receptor serie seleccionas iBUS
hola buenas , tengo una DYS f4 pro y al conectar la bateria se pone led rojo fijo, y al poner al pc no enciende nada y me dice Failed to open serial port.
Gracias de antemano un saludo.
He probado zadig y no reconoce la placa, el demostrator GUI y nada me da que esta muerta un saludo gracias
Hola Manuel.
si solo te enciende el led rojo es que tiene alimentación de batería y te tiene que encender uno verde que es el del bec de 5 volts y parpadear uno azul que es el que indica la actividad del chip.
pero según lo que comentas estos 2 últimos no aparecen por lo que parece la placa esta mal o por lo menos el chip no tiene actividad